
 English
English
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
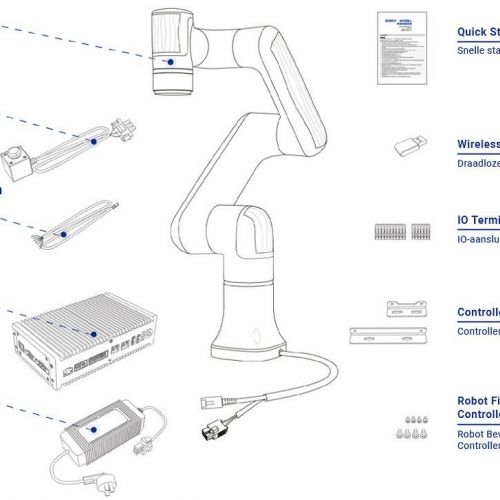
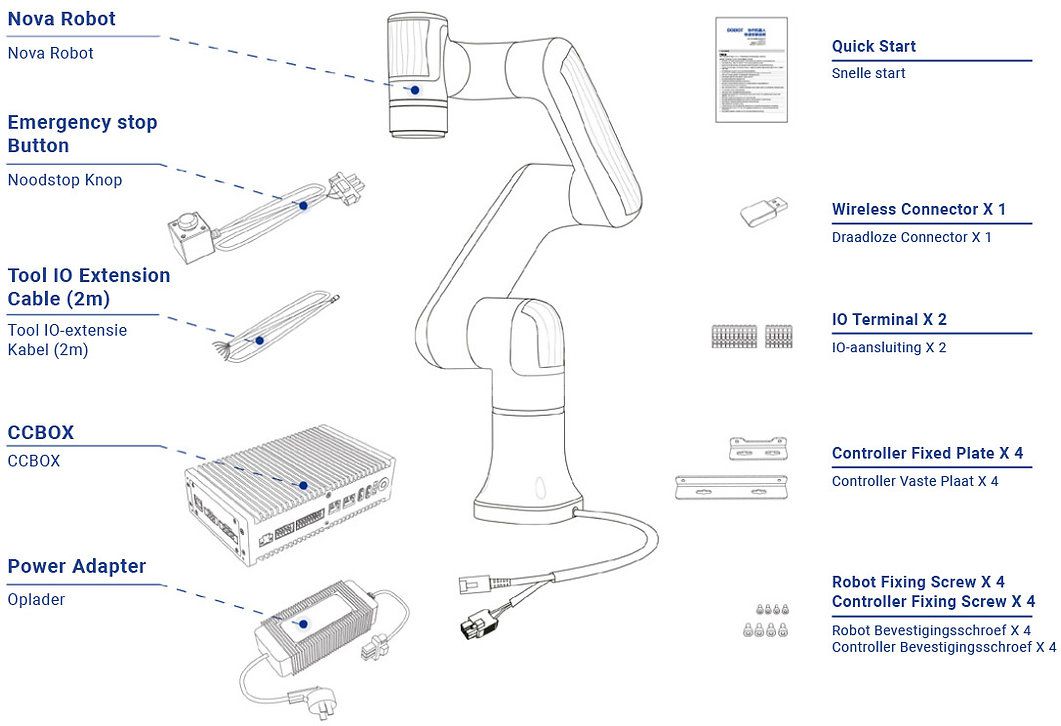
Cobot commerciale DOBOT NOVA 2
Il DOBOT Nova2 è un braccio robotico versatile e compatto progettato per soddisfare scopi commerciali e di vendita al dettaglio.
Il Nova2 presenta una capacità di carico utile di 2 kg, che gli consente di gestire con precisione vari compiti. Che si tratti di assemblaggio, prelievo e posizionamento, test o altre operazioni complesse, Nova2 fornisce la forza e la destrezza necessarie.
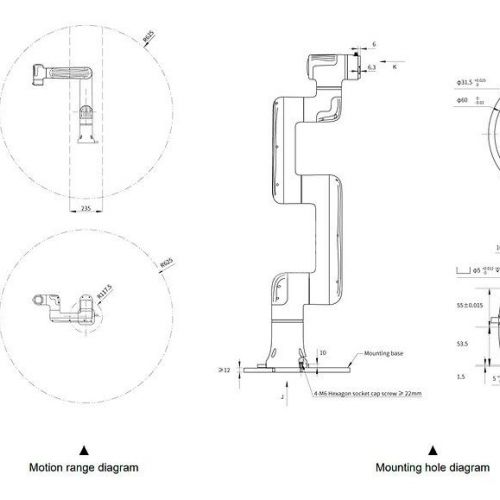
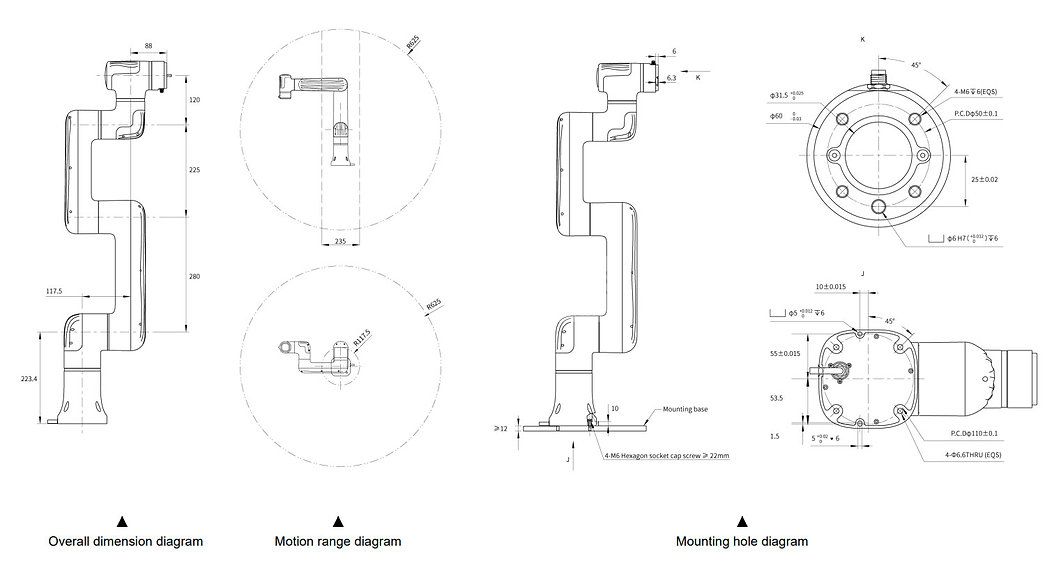
Offre una portata massima di 625 mm, offrendo ampio spazio di lavoro per la manipolazione di oggetti e l'esecuzione di attività.
Nova2 è dotato di un'interfaccia intuitiva che semplifica la programmazione e il controllo. Offre molteplici opzioni di programmazione, tra cui un'interfaccia grafica per un funzionamento intuitivo e un sistema di programmazione basato su blocchi simile a Scratch. Ciò consente agli utenti di tutti i livelli di esperienza di programmare e personalizzare facilmente le azioni del robot in base alle loro esigenze specifiche. Offre molteplici opzioni di programmazione, tra cui l'interfaccia grafica (come scratch), lo scripting utilizzando linguaggi di programmazione (LUA) o API (C, C#, Python, Kotlin...) e la possibilità di insegnare al robot spostandolo manualmente.
Inoltre, Nova2 è compatibile con vari accessori e periferiche, consentendo un'ulteriore personalizzazione ed espansione delle sue capacità. Può essere perfettamente integrato nelle configurazioni e nei flussi di lavoro esistenti, migliorando la produttività e l'efficienza.
La sicurezza è una priorità con Nova2, poiché incorpora funzionalità avanzate come il rilevamento delle collisioni e le capacità di arresto di emergenza. Queste misure di sicurezza garantiscono un ambiente di lavoro sicuro e proteggono sia il robot che gli operatori.
| Peso | 11 kg (24,3 libbre) | |
| Carico utile massimo | 2 kg (4,4 libbre) | |
| Raggio di lavoro | 625 mm (24,6 pollici) | |
| Velocità massima del TCP | 1,6 m/s (63 pollici/s) | |
| Ripetibilità | ±0,05 mm | |
| Gamma di movimento | J1 | ±360° |
| J2 | ±180° | |
| J3 | ±156° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| Velocità massima del giunto | J1/J2/J3 | 135°/s |
| J4/J5/J6 | 135°/s | |
| Fine I/O | DI/FARE | 2 ingressi |
| RS485 | Supportato | |
| Classificazione IP | IP54 | |
| Rumore | 65 dB(A) | |
| Intervallo di temperatura | da 0° a 50° C | |
| Orientamento all'installazione | Qualsiasi angolo | |
| Consumo di energia | Tipico | 100W |
| Massimo | 250W | |
| Lunghezza del cavo dal robot al controller | 3 metri (118,1 pollici) | |
| Materiali | Lega di alluminio, plastica acrilonitrile butadiene stirene | |
| Controllore | |||
| Dimensioni | 200 mm x 120 mm x 55 mm (7,9 pollici x 4,7 pollici x 2,2 pollici) | ||
| Peso | 1,3 kg (2,9 libbre) | ||
| Potenza di ingresso | 30~60 V CC | ||
| Potere IO | 24V, Max 2A, Max 0.5A per ogni canale | ||
| Interfaccia IO | DI | 8 ingressi (NPN o PNP) | |
| FARE | 8 ingressi (NPN o PNP) | ||
| AI | 2 ingressi, modalità tensione, 0~10V | ||
| AO | 2 uscite, modalità tensione, 0~10V | ||
| Accensione/spegnimento remoto | Supportato | ||
| Interfaccia di comunicazione | Interfaccia di rete | 2, per la comunicazione TCP/IP e Modbus TCP | |
| USB | 2, per collegare il modulo wireless USB | ||
| 485 Interfaccia | 1, per comunicazione RS485 e Modbus RTU | ||
| Ambiente | Temperatura | da 0° a 50° C | |
| Umidità | ≤95%, senza condensa | ||
| Classificazione IP | IP20 | ||
| Modalità di raffreddamento | Dissipazione passiva del calore | ||
| Modalità didattica | PC、APP(Android、iOS) | ||



{kind=link}
{kind=link}
{kind=link}