
 English
English
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
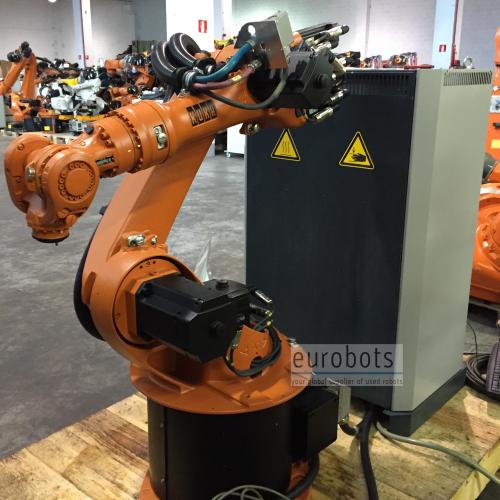
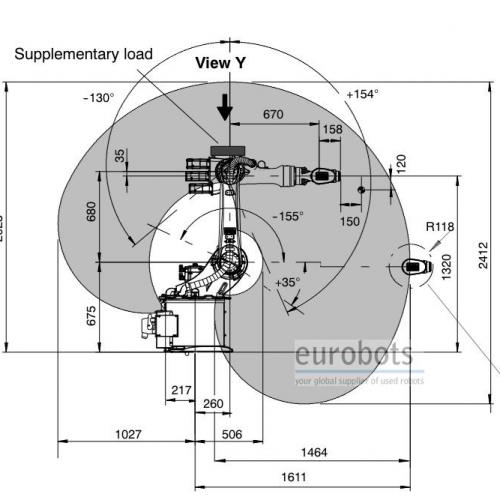
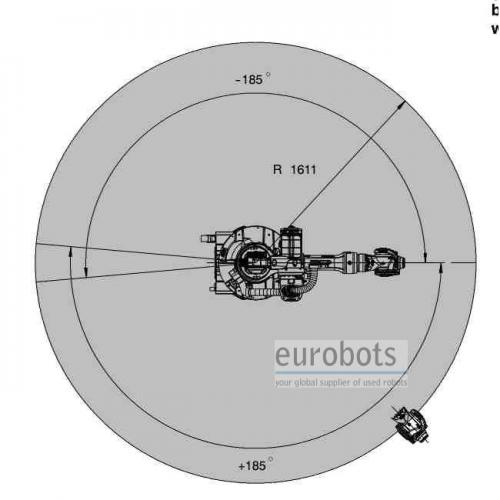
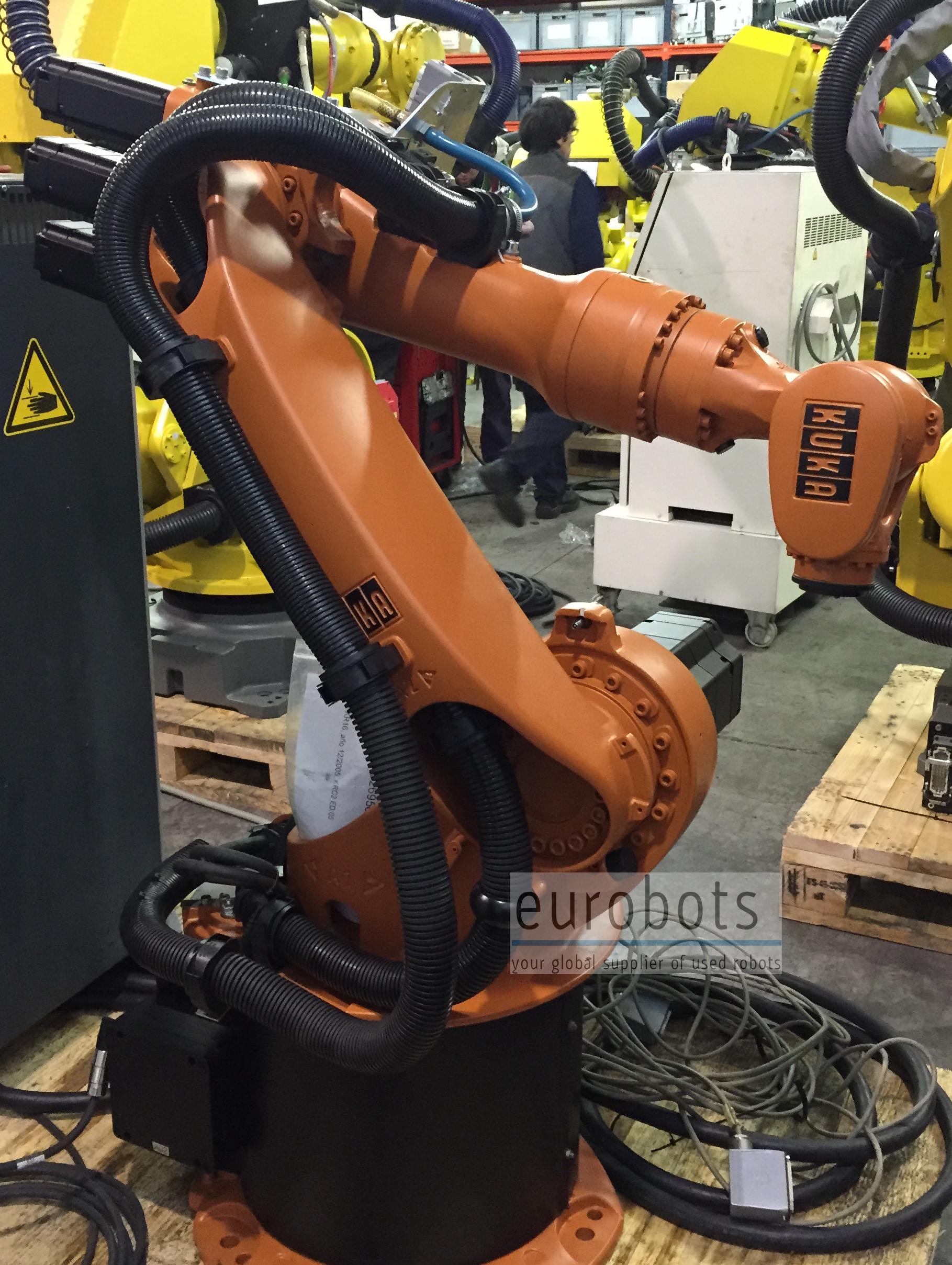
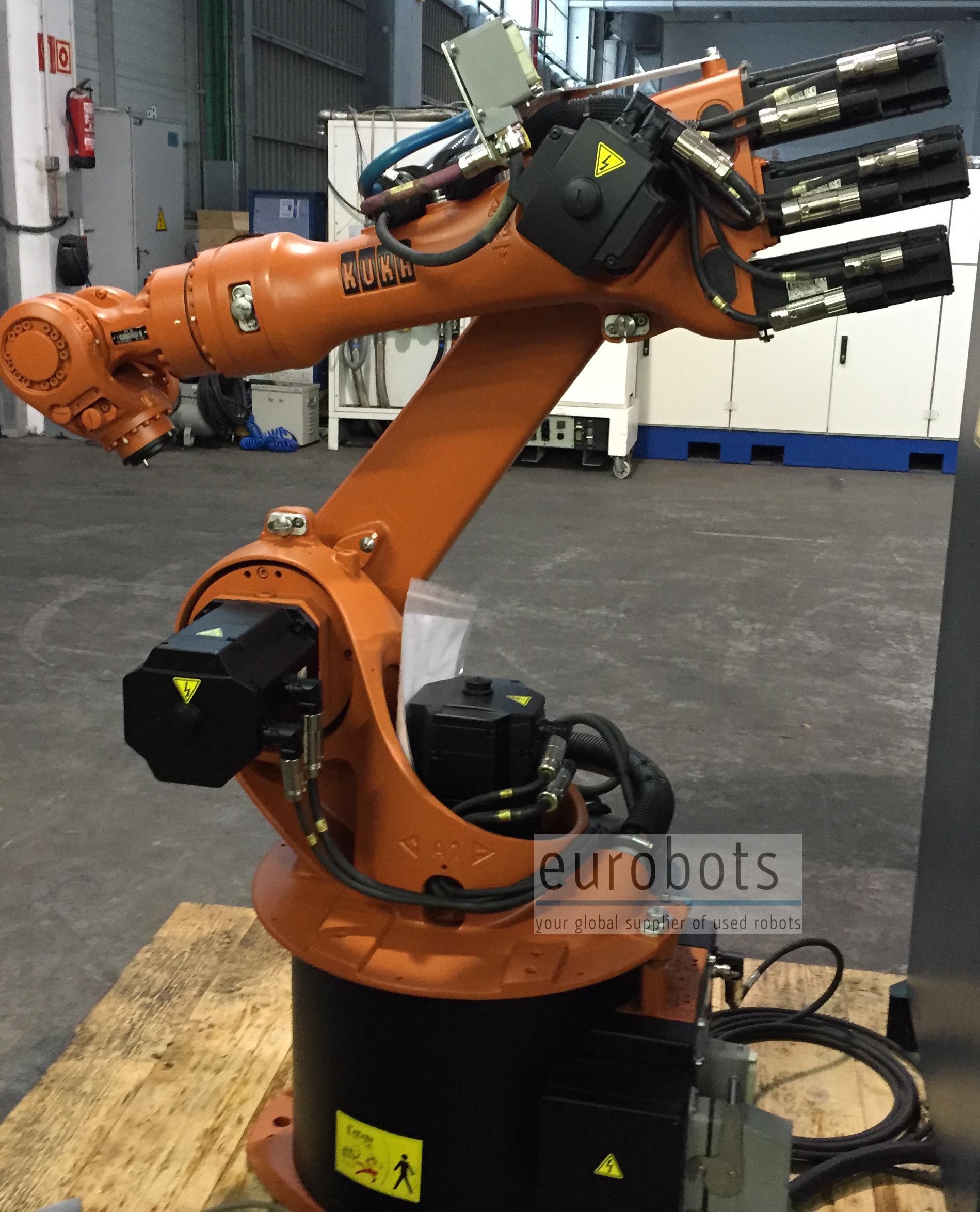
KUKA KR 16/2
Debido a su versatilidad y flexibilidad, el KR 16 está en casa en la mayoría de las industrias manufactureras. Tiempos de ciclo cortos y alta precisión.
Posiciones de montaje: piso, techo, pared.
* 2 ranuras libres para ejes externos
* Ranuras DeviceNet y Ethernet para sistemas de bus comunes (por ejemplo, INTERBUS, PROFIBUS, DeviceNet) provistas de serie
* Función de perfil de movimiento para una interacción óptima entre los motores de los robots individuales y su velocidad.
* Disquetes y unidades de CD-ROM para copia de seguridad de datos
* Instalaciones como el diagnóstico remoto a través de Internet.
* Operación y programación simples a través del Panel de control KUKA (KCP) con interfaz de usuario de Windows
* Armario de control compacto
* Panel de control ergonómico KUKA (KCP)
Información del robot
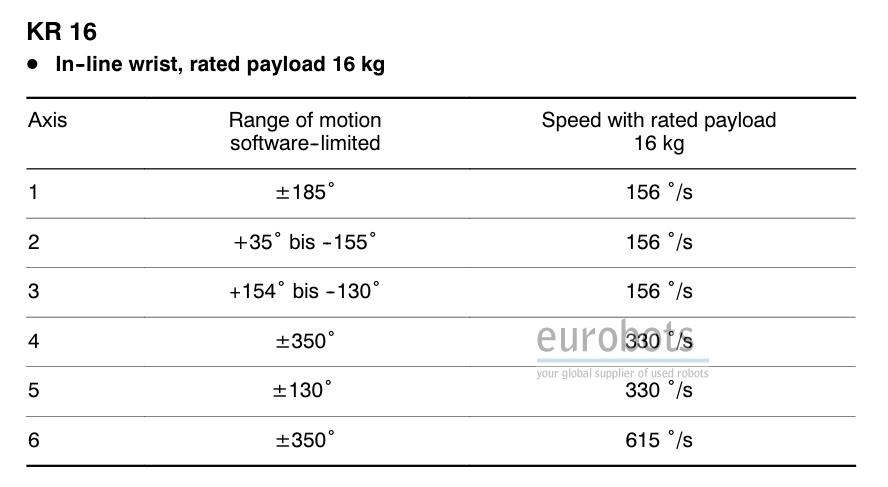
- Ejes: 6
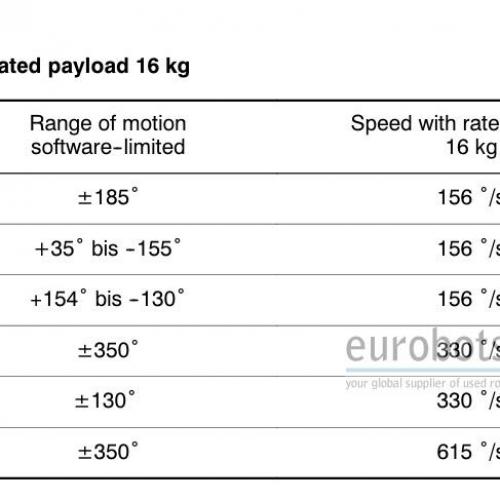
- Carga útil: 16 kg
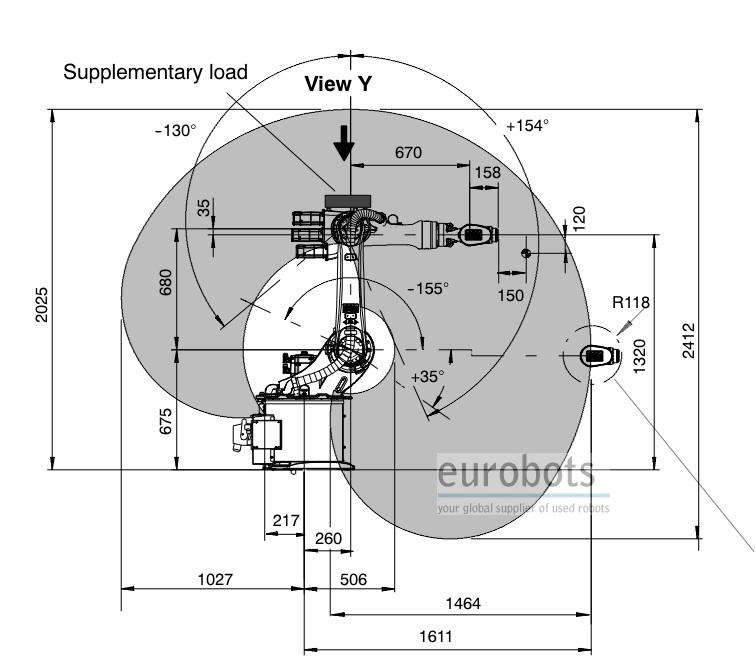
- Alcance H: 1610 mm
- Repetibilidad: ± 0.1 mm
- Masa del robot: 235 kg.
- Montaje: piso, techo, pared
Velocidad de movimiento del robot:
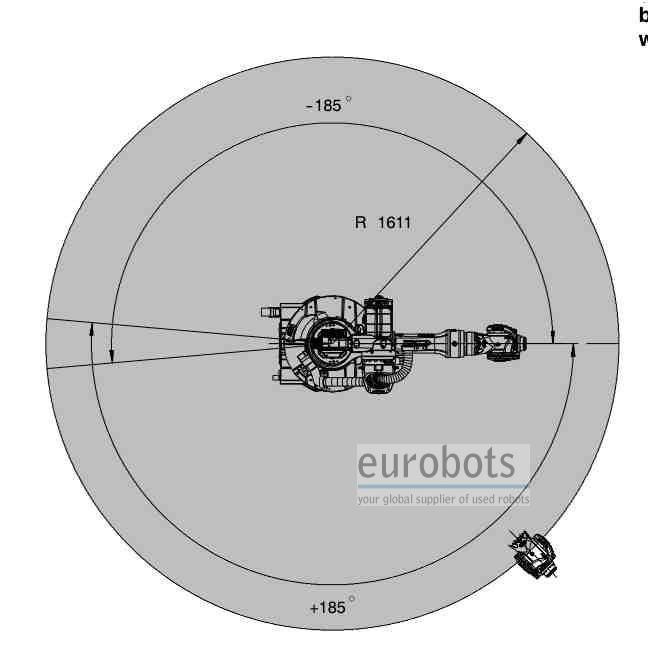
- Eje 1 156 ° / s (2.72 rad / s)
- Eje 2 156 ° / s (2.72 rad / s)
- Eje 3 156 ° / s (2.72 rad / s)
- Eje 4 330 ° / s (5,76 rad / s)
- Eje 5 330 ° / s (5,76 rad / s)
- Eje 6 615 ° / s (10.73 rad / s)
Aplicaciones de robot:
- Mecanizado
- Máquina tendiendo
- Pulido, rectificado y desbarbado
- Recubrimiento y pegado
- Manejo
- Medición y prueba
- Montaje
- Paletizado y preparación de pedidos
- Corte
- Soldadura
Aplicaciones
Soldadura por arco , Presione tendiendo , Paletización , Carga y descarga de piezas , Manipulación de piezas , Montaje de piezas












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}